Десятка самых необычных и продвинутых роботов мира. Где работают андроиды
Роботы. Пока еще это экзотика, но тем не менее, они все увереннее входят в нашу жизнь. Три закона роботехники Айзека Айзимова скоро перестанут быть только развлекательной литературой. Роботы – существа, которые одновременно завораживают и пугают своей человечностью и одновременно машинностью. Производство роботов развивается постоянно. Посмотрите на десятку самых интересных экземпляров на сегодняшний день.
ASIMO: Робот-гуманоид

ASIMO – это робот-гуманоид, созданный компанией Хонда. Ростом в 130 сантиметров и весом в 54 килограмма, робот похож на маленького астронавта, который несет рюкзак. Он умеет ходить на двух ногах, копируя человеческую походку скоростью в 6 км/ч. ASIMO был создан в Японии в «Центре исследований и развития» Хонды. Эта последняя модель в серии, а всего их одиннадцать, первый робот был создан в 1986 году.
Официально имя робота – это сокращение от "Advanced Step in Innovative MObility", то есть буквально «Продвинутый шаг в передовой мобильности».в 2002 году существовало 20 роботов ASIMO. Каждый стоит миллион долларов за производство, и некоторые экземпляры можно взять напрокат за 150 тысяч долларов в месяц.
Распознавание движущихся объектов
Используя зрительную информацию, которую собирает вмонтированная в голову робота видеокамера, ASIMO распознает движения множества объектов, а также оценивает расстояние от них и их направление. С помощью комплекса этих технологий робот может следить за перемещениями людей камерой, следовать за человеком или поприветствовать его, когда он приближается.
Распознавание поз и жестов
ASIMO умеет интерпретировать позиции и движения руки, распознавать позы и жесты. Благодаря чему робот может реагировать не только на голосовые команды, но и на естественные телодвижения людей. Таким образом он, например, понимает, когда ему предлагают рукопожатие или когда человек ему машет, и отвечает взаимностью. Кроме того, он понимает, когда ему указывают направление движения.
Распознавание окружающей среды
ASIMO умеет анализировать окружающие объекты и ландшафт и действовать так, чтобы это было безопасно для него и находящихся рядом людей. Например, он узнает потенциально рискованные объекты, такие, как лестницы, а также останавливается или обходит людей и другие движущиеся объекты, чтобы не столкнуться с ними.
Распознавание звуков
Возможности робота распознавать род звуков углубились, и теперь он знает разницу между голосами и прочими звуками. Он отвечает на свое имя, поворачивается лицом к человеку, с которым разговаривает, реагирует на внезапные необычные звуки вроде упавшего предмета или столкновения, и поворачивает голову в этом направлении.
Распознавание лиц
ASIMO может узнавать человеческие лица, даже когда человек двигается. Он может отдельно различать 10 человеческих лиц. Когда их зарегистрируют в его памяти, он будет обращаться к ним по имени.

Albert Hubo: робот-Эйнштейн

Робот Альберт Хубо (Albert HUBO) – андроидный робот. Его внешний вид составляет голова, которая копирует голову ученого Альберта Эйнштейна, и туловище довольно известного гуманоидного робота Хубо. Период разработки составил три месяца и завершился в ноябре 2005 года. Голова была разработана компанией Hanson-Robotics. Тело сделано из специфического материала, Frubber, который частенько используют в Голливуде.
Голова имеет 35 суставов, благодаря чему может выражать различные эмоции на лице, пользуясь независимыми движениями глаз и губ. Также в голове есть две CCD камеры для визуального распознавания. Кроме того, Альберт умеет вытворять все присущие Хубо представления, поэтому возможно выражать еще больше естественных человеческих движений и манер поведения. В теле спрятаны полимерные литиевые батареи, которые обеспечивают около двух с половиной часов автономной работы робота.
С помощью удаленной сети роботом Альбертом можно управлять из внешнего компьютера. Впервые Альберт Хумо был представлен в 2005 году на саммите АПЕК в Пусане (Корея). Его похвалили многие мировые лидеры: президент США, премьер-министр Японии и т.п.

Stanley: самоуправляемое транспортное средство
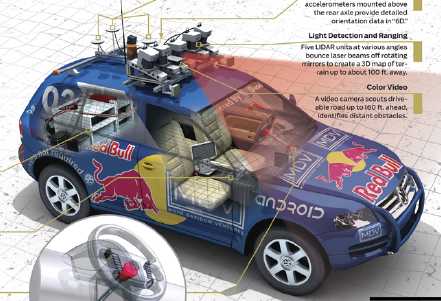
Стэнли (Stanley) – это автономное средство передвижения, созданное гоночной командой Стэнфордского университета. Это обычный Фольксваген Туарег, доработанный до возможности управления только бортовыми компьютерами. Он принимал участие и победил в DARPA Grand Challenge в 2005 году и принес Стаэнфордской гоночной команде приз размером в два миллиона долларов, самый большой денежный приз за всю историю роботов.
Сенсоры, использованные в Стэнли, включают в себя пять лазерных лидаров, пару радаров, стереокамеру и однообъективную камеру. Обрабатывают информацию и определяют позицию машины GPS-приемник, GPS-компас, инерционная система управления, а информацию об одометрии колес получает внутренняя CAN шина Туарега. Компьютерная часть – это шесть мощных компьютеров Intel Pentium M с разными конфигурациями и операционными системами Линукс.
Стэнли наделена системой обнаружения приближающихся препятствий. Данные из лидаров скомбинированы с изображениями из визуальной системы, чтобы составить более полную картину обзора. Если приемлимую дорогу невозможно распознать хотя бы на ближайшие 40 метров, скорость снижается, а лидары ищут безопасный путь.
Кстати, вождение Стэнли программировали, пользуясь записью человеческого вождения в пустыне, а затем устанавливая точное значение каждому биту информации, создаваемой его системой сенсоров. После этой модификации машина-робот начала кататься со скоростью 45 миль в час по дорогам, пересеченным тенями деревьев. Пока точные значения для данных не были заданы, машина испуганно сворачивала с дороги, уверенная, что путь пересечен не тенями, а ямами.

BigDog: робот-мул
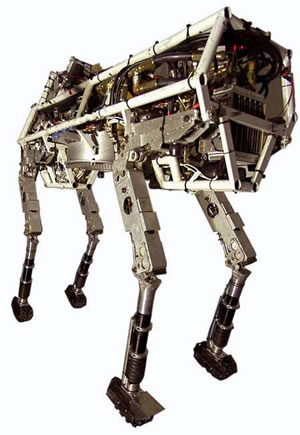
БогДог (BigDog, буквально – Большой Пес) – это четвероногий робот, созданный компанией Boston Dynamics в 2005 году. Проект БигДог финансировало Агентство защиты передовых исследований в надежде, что это создание сможет служить роботом-мулом для солдат на слишком грубой для транспорта местности.
БигДог весит 75 килограммов, он метровый в длину, а в высоты – 0, 7 метра. На данный момент он может путешествовать по тяжелой для передвижения местности со скоростью 5,3 км/ч, нести вес в 54 килограмма и карабкаться по склонам наклоном в 35 градусов.

RiSE: карабкающийся робот

Райз (RiSE) – это маленький шестилапый робот, который забирается по вертикальным поверхностям: стенам, деревьям, заборам. На пятках Райза имеются когти, микрокогти или липкий материал, в зависимости от поверхности, по которой надо лазать. Робот меняет позы, чтобы приспособиться к наклону поверхности, а зафиксированный хвост помогает балансировать на крутых поверхностях. Малыш весит всего 2 килограмма, в длину составляет 0,25 метра, бегает со скоростью 0,3 м/с.
Каждая из шести лап робота оснащена двумя электромоторами. Бортовой компьютер управляет лапами, определяет способ коммуникации с землей и обсуживает разнообразные сенсоры. В том числе сенсор, рассчитывающий инертность, сенсор позиции сустава для каждой лапы, сенсор натяжения лап и датчик контакта ступней.
Будущие версии Райза будут использовать сухое прилипание, чтобы карабкаться по совершенно гладким отвесным поверхностям, таким как стекло и металл. Райз разработали совместно исследователи Пенсильванского университета, университетов Карнеги Меллон, Беркли, Стэнфорда, а также университета Льюиса и Кларка. Проект спонсировал Офис защиты науки DARPA.

QRIO: танцующий робот

QRIO ("Quest for cuRIOsity" – «Задача для любопытства») – это двуногий гуманоидный робот для развлечения, созданный и проданный Сони, чтобы не затухал успех их игрушки AIBO (робот-собачка). QRIO обладает ростом в 0,6 метра и весит 7,3 килограмма.
Робот умеет распознавать голоса и лица, благодаря чему может запоминать людей и их пристрастия и антипатии. Он умеет бегать со скоростью 23 см в секунду, что зафиксировано в Книге рекордов Гиннеса (2005 года) как первый, самый скоростной, двуногий робот, который бегает. Робот QRIO четвертого поколения работает от батареи час.
Четвертое поколение этих роботов умеет танцевать под Hell Yes, музыкальный клип исполнителя Beck. Эти экземпляры дополнены третьей камерой на лбу, и у них улучшили руки и запястья. Программисты работали три недели, чтобы обучить этих роботов хореографии.
Или так ли страшен робот как им пугают
Хочу сразу обратить внимание на то, что роботизированная коробка, несмотря на схожесть в управлении, количество педалей и ручку селектора - совсем не автоматическая коробка с гидротрансформатором. Если для АКПП стояние на месте с включённой передачей - дело естественное (хотя тоже не очень то полезное), то для "робота" это кратчайший путь к различным проблемам и досрочной замене сцепления. Почему так? Потому что роботизированная КПП - это обычная механическая КПП с обычным сцеплением, только вместо водителя "нажимает" сцепление и переключает передачи автоматика. Эта автоматика внимательно следит за действиями водителя, но она не сам водитель, она не может знать, какое действие предпримет водитель в следующее мгновение, а поэтому всегда стремится быть готовой к любому допустимому развитию событий, и прежде всего это касается управлению сцеплением. Например: водитель с МКПП, когда готовится к началу движения, выключает сцепление (нажимает педаль) и включает первую передачу, далее он начинает отпускать сцепление и нажимает педаль "газа", причём делает это одновременно. А робот в этой ситуации выключает сцепление, включает передачу и "отпускает" сцепление до начала схватывания, в этой позиции робот ждёт реакции водителя. Как только водитель отпускает тормоз и нажимает на газ, робот продолжает включение сцепления и автомобиль начинает движение. Т.е. во время "стоянки" с включённой передачей сцепление пребывает в состоянии лёгкого скольжения, естественно греется, а частые и длительные "стоянки" сжигают сцепление "в хлам". Поэтому даже во время коротких остановок, ручку КПП надо переводить в положение "N" . Запомните это и научите этому своих женщин!
Устройство
Как было сказано выше, роботизированная КПП это та же механическая КПП с обычным сцеплением, только управление сцеплением и переключение передач осуществляет автоматика. Коробка передач действительно та же, что и на машинах с МКПП, пробовали менять - подходит.
Вот как выглядит "робот": сверху установлен сервопривод механизма переключений передач, состоящий из привода выбора и привода переключения, тяги которых соединены с механизмом переключения передач КПП. А рядом (на Civic это место под аккумулятором) в отдельном корпусе сервопривод сцепления с блоком управления (можно сказать, что мозги робота находятся в коленке левой ноги). Сервопривод сцепления объединён с главным цилиндром гидравлического привода сцепления. Рабочий цилиндр такой же, как и у сцепления с обычной МКПП.
Функциональная и электрическая схемы.

Модуль управления TCM и исполнительный элемент (сервопривод) сцепления объединены в одном блоке. У поршня главного цилиндра имеется датчик положения.
 К модулю напрямую подсоединены привод выбора передачи (это тот, который двигает виртуальную ручку КПП слева направо) и привод переключения передач (это тот, который включает передачи движением виртуальной ручки вперёд и назад). Каждый из этих приводов оснащён датчиками направления и импульса вращения мотора (их можно увидеть на электрической схеме).
К модулю напрямую подсоединены привод выбора передачи (это тот, который двигает виртуальную ручку КПП слева направо) и привод переключения передач (это тот, который включает передачи движением виртуальной ручки вперёд и назад). Каждый из этих приводов оснащён датчиками направления и импульса вращения мотора (их можно увидеть на электрической схеме).
От блока управления двигателем(ECM) TCM напрямую получает сигналы о скорости автомобиля (VSSAMT), включении стартера (STS), состоянии стояночного тормоза (BKAWD), о запуске двигателя (WEN). TCM выдаёт в ECM разрешение на запуск двигателя (STEN).
Всё остальное взаимодействие осуществляется в цифровом виде по шине CAN:
- с блоком управления двигателем TCM (данные о нажатии педали тормоза, оборотах двигателя, нагрузке на двигатель т.д.);
- с блоком ABS/VSA ведётся двусторонний обмен данными (какими точно сказать не могу, но очевидно, что VSA прекращает работу при неисправности в трансмиссии, а в момент коррекции заноса или пробуксовки TCM получает запрет на переключение передач для избежания прерывания крутящего момента);
- с приборной панелью (индикаторы панели);
- с модулем управления переключением передач, он включает в себя ручку селектора режимов КПП и подрулевые клавиши выбора передач.
Для диагностики неисправностей TCM имеет прямой выход на диагностический разъём.
Хочу обратить внимание, что система не имеет датчика температуры сцепления. Перегрев сцепления (например код неисправности: P19E6 (164-1) Температура сцепления слишком высокая (более 300 °C)) вычисляется TCM по косвенным признакам.
Подробнее это всё можно увидеть на электрической схеме, хотя она наверное будет интересна разве что специалистам. Поэтому я выкладываю схему системы "i-shift" для Civic 5D 2007 модельного года в качестве справочного материала (что бы открыть схему в полном размере нужно кликнуть на эскиз) и перехожу к описанию функционирования "робота".
 |
 |
 |
Функционирование
Принципы управления роботизированной КПП во многом схожи с управлением классической АКПП, но вместе с тем имеют некоторые особенности присущие именно механическим КПП.
При включении зажигания и нахождении ручки селектора в положении "N", "робот" делает жест знакомый каждому водителю - проверяет "нейтраль" в коробке передач. TCM приводит в действие привод выбора передачи и перемещает его поочерёдно в крайние положения. Если никакая передача не включена, то привод остаётся в нейтральном положении. Если включена передача, то задействуется привод включения передачи, передача выключается и снова проверяется "нейтраль".
При включении зажигания и нахождении ручки селектора в положении "A" или "R" никакие действия не производятся, пока селектор не будет переведён в положение "N". TCM блокирует включение стартера, если не нажата педаль тормоза, селектор не находится в положении "N", механизм переключения передач не установлен в нейтральное положение, в системе обнаружена неисправность не допускающая дальнейшую эксплуатацию трансмиссии. Если условия для запуска двигателя соблюдены, то TCM выдаёт в ECM сигнал разрешения на работу стартера STEN.
После запуска двигателя включение режимов движения осуществляется только при нажатой педали тормоза.
При включении режима "A" включается первая передача и далее, если не переходить на ручное управление переключениями передач, "робот" автоматически управляет сцеплением и переключает передачи.
В положении "R" соответственно включается задняя передача. При этом существует защита от случайного включения - задняя передача не включится, если автомобиль движется со скоростью больше 3 км/ч, даже при нажатой педали тормоза.
При трогании с места в горку, "роботу" нужно помочь стояночным тормозом - включить "ручник", отпустить педаль тормоза и плавно нажимая педаль "газа" отпустить "ручной тормоз". Не стоит пытаться быстро отпустить тормоз и резко нажать на "газ" - для сцепления это будет шоковая терапия, двигатель может заглохнуть, а автомобиль откатиться.
Принудительной блокировки трансмиссии, такой как "паркинг" в АКПП, у системы "i-shift" нет. Поэтому если автомобиль паркуется на уклоне, то перед тем как заглушить двигатель селектор нужно оставить в положении "A", тогда после остановки двигателя "робот" отпустит сцепление и в коробке передач останется включённой 1-я передача.
 При включении режима "A" "робот" функционирует в режиме автоматического переключения передач. Основными критериями для выбора передач являются скорость автомобиля и положение дроссельной заслонки. Как видно из графиков: чем сильнее нажата педаль газа, тем позже происходят переключения на повышенные передачи (алгоритм такой же как и в АКПП).
При включении режима "A" "робот" функционирует в режиме автоматического переключения передач. Основными критериями для выбора передач являются скорость автомобиля и положение дроссельной заслонки. Как видно из графиков: чем сильнее нажата педаль газа, тем позже происходят переключения на повышенные передачи (алгоритм такой же как и в АКПП).
 Примерно такой же алгоритм для переключений на пониженные передачи при замедлении. На графиках видно, что чем сильнее нажата педаль газа, тем раньше происходят переключения на низшие передачи. Таким образом, если при движении с постоянной скоростью нажать сильнее на "газ", то наступают условия для переключения на пониженную передачу или даже на две. Например: машина движется со скоростью 60 км/ч (красная линия на графике), на 5-й передаче с открытием ДЗ около 40%. Нажимаем сильнее "газ" до 60% и попадаем в зону, где должна быть включена 4-я передача. А если нажать "тапку в пол" на 100%, то автоматически переключимся уже на 3-ю. Таким образом реализована функция так называемого "kick-down".
Примерно такой же алгоритм для переключений на пониженные передачи при замедлении. На графиках видно, что чем сильнее нажата педаль газа, тем раньше происходят переключения на низшие передачи. Таким образом, если при движении с постоянной скоростью нажать сильнее на "газ", то наступают условия для переключения на пониженную передачу или даже на две. Например: машина движется со скоростью 60 км/ч (красная линия на графике), на 5-й передаче с открытием ДЗ около 40%. Нажимаем сильнее "газ" до 60% и попадаем в зону, где должна быть включена 4-я передача. А если нажать "тапку в пол" на 100%, то автоматически переключимся уже на 3-ю. Таким образом реализована функция так называемого "kick-down".
Если в положении "A" селектора режимов сдвинуть ручку вперёд (в положение "+") или назад (в положение "-"), или нажать подрулевые лепестки "+" или "-", TCM переходит в режим ручного управления переключениями передач и остаётся в этом режиме до тех пор, пока ручка селектора не будет переведена в положение "N", а затем снова включен режим "A".
В режиме ручного управления передачи переключаются по командам водителя, но во избежание повреждения трансмиссии или двигателя на переключения наложены ограничения, суть которых изложена на двух следующих диаграммах:


Если водитель пытается сделать переключение, которое в данных условиях движения недопустимо, переключение передачи не происходит.
Во избежании случайных переключений передач, учитывается продолжительность нажатия ручки или подрулевых лепестков - TCM игнорирует слишком частые включения. Если время переключения составляет меньше 110 мс (60 мс для ВКЛ, 50 мс для ВЫКЛ), раздается звуковой сигнал, и переключение передачи не выполняется.
Особенности работы привода переключения.
 Как уже говорилось, привод переключения состоит из привода выбора передач (осуществляет поперечное движение кулисы) и привода включения передач (продольное движение кулисы) собранных в одном корпусе. Приводы представляют собой электромоторы с червячными редукторами и зубчатыми парами "колесо-шток". Штоки через шаровые шарниры соединены с тягами, которые соединены с механизмом переключения передач.
Как уже говорилось, привод переключения состоит из привода выбора передач (осуществляет поперечное движение кулисы) и привода включения передач (продольное движение кулисы) собранных в одном корпусе. Приводы представляют собой электромоторы с червячными редукторами и зубчатыми парами "колесо-шток". Штоки через шаровые шарниры соединены с тягами, которые соединены с механизмом переключения передач.
В приводах нет датчиков положения, но есть датчики направления вращения мотора и импульса вращения (знакомые многим датчики Холла). По этим датчикам определяются положения приводов и сопротивление, которое оказывают приводам механизм переключения передач.
 TCM "помнит" крайние точки хода привода выбора (ход "слева-направо") и делит этот диапазон на 4 части. Привод включения работает "до упора", но при этом TCM должен учитывать сопротивление синхронизаторов и не реагировать на замедление электромотора до достижения точки включения передачи. Т.е. "робот" действует точно так же как и живой водитель - перемещает "виртуальную ручку КПП" в поперечном направлении по памяти, а в продольном до упора с учётом работы синхронизаторов. А раз так, то "роботу" так же как и человеку, необходимо обучение, в ходе которого он запомнит крайние положения приводов от которых будет координировать свою работу в дальейшем. Процедура обучения производится при помощи фирменной диагностической системы HDS, об этом будет рассказано ниже.
TCM "помнит" крайние точки хода привода выбора (ход "слева-направо") и делит этот диапазон на 4 части. Привод включения работает "до упора", но при этом TCM должен учитывать сопротивление синхронизаторов и не реагировать на замедление электромотора до достижения точки включения передачи. Т.е. "робот" действует точно так же как и живой водитель - перемещает "виртуальную ручку КПП" в поперечном направлении по памяти, а в продольном до упора с учётом работы синхронизаторов. А раз так, то "роботу" так же как и человеку, необходимо обучение, в ходе которого он запомнит крайние положения приводов от которых будет координировать свою работу в дальейшем. Процедура обучения производится при помощи фирменной диагностической системы HDS, об этом будет рассказано ниже.
Особенности работы привода сцепления.
 "Электронная нога" в своей работе ориентируется на датчик положения поршня. т.е. TCM всегда знает истинное положение привода главного цилиндра. Это необходимо для более "деликатного" управления сцеплением, в ходе которого "робот" сталкивается с двумя специфическими проблемами:
"Электронная нога" в своей работе ориентируется на датчик положения поршня. т.е. TCM всегда знает истинное положение привода главного цилиндра. Это необходимо для более "деликатного" управления сцеплением, в ходе которого "робот" сталкивается с двумя специфическими проблемами:
Первую проблему я описывал в предисловии - TCM не знает какое действие предпримет водитель в следующее мгновение, а значит действия привода должны следовать за действиями водителя, и он всегда будет в роли отстающего. "Робот" вынужден минимизировать это отставание, а значит при начале движения, остановке и иных манёврах, должен держать сцепление на грани "схватывания", что бы не тратить драгоценное время на свободный ход.
Вторая проблема: в процессе переключения передач разрывается связь двигателя с трансмиссией и прерывается крутящий момент, и это не контролируется водителем. К тому же "роботу" приходится вмешиваться в работу двигателя и в ходе переключения передач прикрывать дроссельную заслонку, что бы избежать "заброса оборотов", поскольку водитель продолжает нажимать на "газ". Всё это негативно сказывается на безопасности вождения, поэтому необходимо минимизировать время переключения и прерывание крутящего моментя. Для этого сцепление не должно выключаться полностью, а только до точки "схватывания" и оставаться с состоянии небольшой пробуксовки.
Для обеспечения такого "тонкого" управления привод должен быть точно настроен под сцепление, ведь любой водитель знает, что у каждой машины "своё" сцепление со своим характером и особенностями, которые к тому же склонны меняться со временем. Настройка привода производится во время обучения, в ходе которого TCM запоминает положение начала "схватывания" сцепления, а также коэффициент трения в промежуточных положениях. В дальнейшей работе TCM ориентируется на запомненные настройки и коррекцию настроек не производит. Это означает, что со временем качество переключений будет ухудшаться и потребуется визит к дилеру или в сервис, в котором имеется фирменная диагностическая система HDS, для выполнения обучения.
Обучение системы "i-shift".
Процедуры обучения TCM скомпонованы в две программы: "Программирование в статическом режиме
" и "Программирование в динамическом режиме
" и входят в состав диагностического комплекса HDS. В русскоязычной версии они называются "Обработка данных..." - это издержки машинного перевода. В дальнейшем я постараюсь давать более правильные названия, поэтому не надо удивляться различиям в тексте и на картинках.
Программирование в статическом режиме включает в себя:
5. Программирование положения включения сцепления 3.
Этот режим выполняется на месте, на полностью собранном и исправном автомобиле. В ходе обучения потребуется заводить двигатель. В течение всей процедуры зажигание должно быть включено, поэтому если нет уверенности в свежести аккумулятора, лучше сразу подключить зарядное устройство или резервный аккумулятор, что бы потом не повторять процедуру заново.
Программирование в динамическом режиме отличается от статического наличием ещё одного пункта, который выполняется на автомобиле в движении:
1. Программирование положений привода переключения передач.
2. Программирование положений синхронизации.
3. Программирование положения включения сцепления 1.
4. Программирование положения включения сцепления 2.
5. Программирование коэффициента трения сцепления.
6. Программирование положения включения сцепления 3.
Для выполнения обучения в движении необходимо, что бы HDS была установлена на мобильном компьютере с независимым источником питания.
После начала программы, она обязательно должна быть выполнена до конца, в противном случае TCM заблокирует запуск двигателя и движение на автомобиле будет невозможно!
Рассмотрим все процедуры поочерёдно (кликните на картинку, что бы открыть её в полном размере):
1. Программирование положений привода переключения передач.
 |
 |
 |
Данная процедура выполняется при неработающем двигателе. Привод переключения передач проверяет нейтраль, затем поочередно включает передачи и TCM запоминает усилия на моторах привода для каждой передачи. Для этого сначала обрабатываются включения крайних ходов кулисы: сперва 1-я и 2-я, затем задняя, а потом средних ходов: 5-я и 6-я, 3-я и 4-я.
2. Программирование положений синхронизации.
 |
 |
 |
Для выполнения этого этапа запускается двигатель. Автомобиль удерживается на месте стояночным и рабочим тормозом (если в ходе выполнения хоть один из тормозов будет выключен, процедура будет остановлена). После запуска двигателя привод переключения передач поочередно делает попытки включения передач движения вперёд: 6-ю, 5-ю, 4-ю, 3-ю, 2-ю и 1-ю, до упора в синхронизаторы (сопротивление синхронизаторов определяется по падению оборотов двигателя). TCM запоминает время необходимое на преодоление сопротивления синхронизаторов каждой передачи.
3. Программирование положения включения сцепления 1.
 |
 |
 |
4. Программирование положения включения сцепления 2.
 |
 |
 |
Обе эти процедуры так же выполняются при работающем двигателе и требуют внимания от оператора, т.к. по команде HDS необходимо быстро включать и выключать селектор передач. Автомобиль по прежнему удерживается на месте стояночным и рабочим тормозом. Далее по команде программы оператор включает селектор в положение "A" (на это программа отводит 5 секунд, но с учётом заторможенности интерфейса реально у оператора на переключение остаётся 2-3 секунды). Далее TCM выключает сцепление, включает передачу и начинает плавное включение сцепления до момента начала падения оборотов двигателя. Так определяется точка начала "схватывания" сцепления. "Положение включения сцепления 1" запоминается как предварительная настройка.
"Программирование положение включения сцепления 2" выполняется так же, но с большей точностью, для этого привод сцепления быстро подводится к точке "Включения сцепления 1", а затем медленно включает сцепление до момента заметного падения оборотов двигателя и эта точка запоминается.
5. Программирование коэффициента трения сцепления.
 |
 |
 |
 |
 |
Эта процедура выполняется только в движении по дороге (вывешивать на подъёмнике бесполезно). Коробка передач должна успеть переключиться на все передачи прямого хода от 1-й до 6-й, для этого необходим ровный участок протяжённостью 400-500 м. (ну в крайнем случае метров 300, на меньшем участке не успеть разогнаться до 6-й передачи).
Во время поездки можно передачи переключать вручную, надо только делать паузы между передачами. Количество поездок не ограничивается, процедура будет закончена только после того как будут задействованы все шесть передач.
В ходе этой процедуры TCM измеряет и запоминает коэффициент трения сцепления по разнице скоростей двигателя и первичного вала КПП (она вычисляется из скорости автомобиля и передаточного числа) в определённом положении сцепления. Это положение заложено в характеристиках сцепления хранящихся в базе данных HDS для каждой модели автомобиля и очевидно отмерятся от точки положения сцепления "2".
6. Программирование положения включения сцепления 3.
 |
 |
 |
Эта процедура завершает процесс обучения. При статическом программировании данный этап следует 5-м сразу за программированием положения включения сцепления 2. При динамическом программировании после программирования коэффициента трения HDS если необходимо осуществит охлаждение двигателя, что бы вентиляторы не включались во время выполнения процедуры.
Далее автомобиль так же удерживается стояночным и рабочим тормозом, по команде HDS оператор включает и выключает передачу, а TCM несколько раз плавно включает сцепление и запоминает среднее положение "схатывания". Данное положение считается наиболее точным положением начала включения сцепления.
После успешного выполнения последней процедуры ТС готово к движению. Если по каким либо причинам программа будет прервана, TCM заблокирует включение стартера и эксплуатация автомобиля будет невозможна. В этом случае можно попробовать повторить программу.
Если даже несколько попыток выполнения обучения закончились неудачей, то необходимо устранить неисправность препятствующую выполнению процедуры.
Невозможность выполения программирования коэффициента трения сцепления можно попытаться обойти путём выполнения программирования в статическом режиме, тогда "проблемная" процедура будет пропущена. В этом случае стоит задуматься о возможной необходимости замены сцепления, но хотя бы автомобиль будет готов "на ходу".
 Если прерываются процедуры программирования положения сцепления, то можно попробовать чистку ДЗ с последующей "пропиской" - провалы холостого хода могут препятствовать корректному измерению положения включения сцепления.
Если прерываются процедуры программирования положения сцепления, то можно попробовать чистку ДЗ с последующей "пропиской" - провалы холостого хода могут препятствовать корректному измерению положения включения сцепления.
Если и это не поможет, тогда нужно проверять привод сцепления, обратить внимание на состояние тормозной жидкости в приводе, возможно выполнить её замену и/или прокачку (удаление воздуха из привода).
Ну и наконец возможно проблема в самом сцеплении: оно изношено и нуждается в замене, или сцепление заменено, но неправильно собрано, или при замене сцепления применялись неподходящие детали.
 Если программа останавливается на этапе программирования положений привода переключения передач или положения синхронизации, то для начала необходимо вручную установить кулисы механизма переключения передач в среднее положение - если привод включения был оставлен в положении включённой передачи, то при включении привода выбора его может заклинить и процедура будет остановлена. После установки механизмов в среднее положение желательно выполнить калибровку элекродвигателей привода переключений. Если это не поможет, то нужно произвести обслуживание привода переключения передач.
Если программа останавливается на этапе программирования положений привода переключения передач или положения синхронизации, то для начала необходимо вручную установить кулисы механизма переключения передач в среднее положение - если привод включения был оставлен в положении включённой передачи, то при включении привода выбора его может заклинить и процедура будет остановлена. После установки механизмов в среднее положение желательно выполнить калибровку элекродвигателей привода переключений. Если это не поможет, то нужно произвести обслуживание привода переключения передач.
Обслуживание.
Какие мероприятия по обслуживанию "робота" следует проводить в рамках технического обслуживания?
1. Не забываем, что привод сцепления гидравлический и устроен точно так же как и тормозная система, поэтому там применяется тормозная жидкость.  По регламенту Honda для стран СНГ тормозная жидкость меняется через 36 месяцев независимо от пробега. И в приводе сцепления её тоже надо менять!
Причём для этого нужна диагностическая система HDS, поэтому для выполнения данной процедуры придётся обращаться к дилерам или в сервис, где есть соответствующее оборудование. Почему то именно дилеры зачастую игнорируют привод сцепления - я с коллегами неоднократно наблюдал там тозмозную жидкость совершенно непотребного состояния при том, что в тормозной системе она была свежая, а владельцы машин заверяли, что предыдущее обслуживание проводилось только у дилеров (это вероятно из-за того, что в регламенте написано "Замена тормозной жидкости", но где именно не указано, а включать мозги похоже там не модно).
По регламенту Honda для стран СНГ тормозная жидкость меняется через 36 месяцев независимо от пробега. И в приводе сцепления её тоже надо менять!
Причём для этого нужна диагностическая система HDS, поэтому для выполнения данной процедуры придётся обращаться к дилерам или в сервис, где есть соответствующее оборудование. Почему то именно дилеры зачастую игнорируют привод сцепления - я с коллегами неоднократно наблюдал там тозмозную жидкость совершенно непотребного состояния при том, что в тормозной системе она была свежая, а владельцы машин заверяли, что предыдущее обслуживание проводилось только у дилеров (это вероятно из-за того, что в регламенте написано "Замена тормозной жидкости", но где именно не указано, а включать мозги похоже там не модно).
2. Трансмиссионное масло в КПП меняется точно так же как и в обычной МКПП - через 48-60 тыс км. в зависимости от условий эксплуатации.
Теперь о работах, которые не предусмотрены регламентом, но с них следует начинать при возникновении подозрений на некоректность работы "робота" (ествственно я исхожу их того, что все работы по регламенту выполнялись вовремя):
1. Обучение системы при помощи HDS. Предпосылками для этого являются: некорректная работа сцепления при трогании, рывки или кратковременные пробуксовки при переключениях передач. Это как правило помогает решить проблему, ведь в процессе работы сцепление изнашивается и настройки привода сцепления сбиваются, а обучение восстанавливает корректные настройки.
 2. Обслуживание привода переключения передач, которое заключается в чистке и смазке шестерёнок и зубчатых штоков. Предпосылками для этого является обнаружение TCM неисправностей привода переключения передач например: P0780 (165-2) Неисправность системы переключения передач; P0919 (162-6) Истекло запрограммированное время нейтрального положения исполнительного механизма переключения передач. Неисправность вызвана заедаением штоков привода из-за накопления продуктов трения и высыхаия смазки. После сборки привода обязательно выполнение процедур калибровки привода и обучения системы.
2. Обслуживание привода переключения передач, которое заключается в чистке и смазке шестерёнок и зубчатых штоков. Предпосылками для этого является обнаружение TCM неисправностей привода переключения передач например: P0780 (165-2) Неисправность системы переключения передач; P0919 (162-6) Истекло запрограммированное время нейтрального положения исполнительного механизма переключения передач. Неисправность вызвана заедаением штоков привода из-за накопления продуктов трения и высыхаия смазки. После сборки привода обязательно выполнение процедур калибровки привода и обучения системы.
Заключение.
Надеюсь, что после прочтения этой статьи система "i-shift" от Хонды не будет уже пугать своей нерпедсказуемостью.
В заключении хочу ещё раз акцентировать внимание на следующих особенностях "робота":
Крайне нежелательно стоять на месте с включённой передачей (режимы "A" или "R"). В городе нужно ехать примерно так: включил передачу - поехал, остановился на светофоре - выключил передачу, загорелся зелёный - включил передачу, поехал дальше; этим Вы продлите жизнь сцеплению.
Будет совершенно нелишним проводить обучение "робота" в профилактических целях присовокупив эту процедуру к плановому техническому обслуживанию автомобиля. Как часто? По моему субъективному мнению не реже раза в 45-50 тыс. км пробега или раз в два года. В зависимости от условий эксплуатации эту периодичность нужно корректировать. Например при постоянной езде по московским пробкам обучение лучше проводить каждый год.
Ну и в самом конце немного о диагностике. Как и любая электронная система, "i-shift" имеет собственную систему самодиагностики. При обнаружении неисправности у "робота" на приборной панели автомобиля загорается индикатор . В таком случае рекомендую не игнорировать это, а в кратчайшее время сделать диагностику. Если этого не сделать и не устранить неполадку, то следующая неисправность может привести к блокировке стартера и тогда до сервиса своим ходом Вы уже не доедете. Если индикатор неисправности загорелся после продолжительного толкания в пробке, остановитесь (так что бы не мешать другим участникам движения) и постойте на месте с ВЫКЛЮЧЕННОЙ передачей минут 15, двигатель при этом глушить не обязательно. Возможно TCM "заподозрил" перегрев сцепления.
Расшифровку кодов неисправностей можно найти в разделе "Документация":
QRIO (от англ. Q uest for cuRIO sity, изначально назывался, как Sony Dream Robot или SDR ) - разработанный компанией Sony двуногий робот- . Рост робота составляет 58 сантиметров, вес - 8 килограмм. Встроенные 38 сервомоторов наделяют QRIO достаточной свободой движений и хорошей координацией. Например, робот может быстро передвигаться, брать предметы, подниматься по лестнице, танцевать и держать равновесие, стоя на одной ноге.
QRIOРобот знает 60000 слов на разных языках мира, умеет распознавать лица, слушаться команд и, как утверждают разработчики, задавать «умные» вопросы в зависимости от ситуации.
За движения и интеллект QRIO отвечают три встроенных компьютера на базе RISC R5000 с 64 Мб оперативной памяти. В качестве операционной системы используется Aperios. Также робот оснащён стереообъективами, семью микрофонами и 36 датчиками движения, семь из которых отвечают за безопасность.
В 2005 году QRIO был внесён в "Книгу рекордов Гиннесса" как наиболее быстро передвигающийся робот-гуманоид. Он позиционируется как первый двуногий робот, умеющий бегать (под бегом подразумевается возможность перемещения, когда обе ноги робота не соприкасаются с землёй). QRIO умеет бегать со скоростью 23 сантиметра в секунду.
Неизвестно, сколько сейчас существует прототипов QRIO, однако когда-то были замечены 10 роботов, танцующих одновременно. Эта информация была подтверждена представителями Sony 22 января 2006 года в Музее науки в Бостоне. Также представители Sony рассказали о том, что существуют прототипы четвёртого поколения (без третьей камеры на лбу, и с улучшенной координацией движений).
Видео, на котором танцуют 4 робота QRIO:
Внутренней батареи QRIO четвёртого поколения хватает примерно на 1 час непрерывной работы.
QRIO - это следующий шаг компании Sony в области развлекательных роботов после созданного ей AIBO. На данный момент роботы находятся на стадии тестирования и речи об их продаже пока не идёт.
Aibo (яп. 愛慕 айбо означает «любовь», «привязанность», а также может значить «товарищ»; ещё существует аббревиатура англ. A rtificial I ntelligence RoBO t ) - собака-робот, разработанная компанией Sony. Она имеет множество модификаций, первая модель была выпущена в 1999 году. AIBO умеет ходить, «видеть» окружающие его предметы с помощью видеокамеры и инфракрасных датчиков расстояния, распознавать команды и лица. Робот является полностью автономным: он может учиться и развиваться, основываясь на побуждениях своего хозяина, обстановки, или другого AIBO. Несмотря на это, он поддаётся настройкам с помощью специальных программ. Существует программное обеспечение имитирующее «взрослую собаку», которая сразу использует все свои функции и программное обеспечение имитирующее «щенка», который раскрывает свои возможности постепенно.
 Две собачки AIBO разных моделей - ERS-210 (слева) и ERS-111 (справа)
Две собачки AIBO разных моделей - ERS-210 (слева) и ERS-111 (справа)
«Настроение» AIBO может меняться в зависимости от окружающей обстановки, и влиять на поведение. Инстинкты позволяют AIBO двигаться, играть с его игрушками, удовлетворять своё любопытство, играть и общаться с хозяином, самостоятельно подзаряжаться и просыпаться после сна. Разработчики утверждают, что у AIBO есть шесть чувств: счастье, грусть, страх, антипатия, удивление, и гнев.
Модельный ряд Aibo:
- ERS110-ERS111 (1999) - включал способность учиться от окружающей среды и выражать эмоции
- ERS210 (2000) - добавились функции распознавания лиц и голоса, датчики прикосновения
- ERS311-ERS312 (2001) - более дружелюбная внешность
- ERS220 (2001) - новый hi-tech дизайн и улучшенные сенсоры
- ERS-7 (2003) - беспроводное соединение с интернет и улучшенные возможности по взаимодействию
В настоящее время разработка QRIO и AIBO приостановленна.
Аналогичный робот Asimo был разработан компанией Honda.
Asimo (сокращение от англ. A dvanced S tep in I nnovative MO bility; прогрессивныйшаг в инновационной мобильности ) - робот- . Создан корпорацией Хонда, в Центре Фундаментальных Технических Исследований Вако (Япония). Рост 130 см, масса 54 кг. Способен передвигаться со скоростью быстро идущего человека - до 6 км/ч.

Согласно неофициальной версии, своё имя ASIMO получил в честь Айзека Азимова , знаменитого автора Трёх Законов Роботехники . В японском языке имя робота произносится как «Асимо» и созвучно со словосочетанием «А также ноги».
По информации 2007 года - в мире существует 46 экземпляров АСИМО. Стоимость производства каждого из них не превышает одного миллиона долларов, а некоторых роботов можно даже взять в аренду, за $166 000 в год (около $14 000 в месяц).
Представители Хонда говорят, что это правило - только аренда, но не продажа - иногда доставляет им проблемы. Например, во время демонстрации АСИМО некому арабскому шейху, инженерам было весьма непросто объяснить, что робот не продаётся в принципе - ни за какие деньги.
ASIMO способен различать людей по специальным карточкам, которые носятся на груди. Асимо умеет ходить по лестнице.
Экспериментальные модели:
- Honda E0, представлен в 1986
- Honda E1, представлен в 1987
- Honda E2, представлен в 1987
- Honda E3, представлен в 1987
- Honda E4, представлен в 1991
- Honda E5, представлен в 1991
- Honda E6, представлен в 1991
Прототипы гуманоидов:
- P1, представлен в 1993
- P2, представлен в 1996
- P3, представленный в 1997
- P4, представленный в 2010

- АСИМО, представлен в 2000
- АСИМО для сдачи в аренду, представлен в 2001
- АСИМО, с расширенной технологией распознавания, представлен в 2002
- АСИМО следующего поколения, представлен в 2004
- АСИМО, представлен в 2005 году
- АСИМО, выпущенный в 2010 году
Короткое демо-видео развития моделей робота АСИМО:
А на этом видео АСИМО не справляется с подъёмом по ступенькам (примечание: на YouTube это видео датируется, в частности, 2006 годом):
Распознавание движущихся объектов
У АСИМО в голову встроена видеокамера. С её помощью АСИМО может следить за перемещениями большого числа объектов, определяя дистанцию до них и направление. Практические применения этой функции следующие: способность следить за перемещениями людей (поворачивая камеру), способность следовать за человеком и способность «приветствовать» человека, когда он войдёт в пределы досягаемости.
Распознавание жестов
АСИМО умеет также верно истолковывать движения рук, распознавая тем самым жесты. Вследствие этого можно отдавать АСИМО команды не только голосом, но и руками. Например, АСИМО понимает, когда собеседник собирается пожать ему руку, а когда машет рукой, говоря «До свидания». АСИМО может также распознавать указующие жесты, типа «иди вон туда».
Распознавание окружения
АСИМО умеет распознавать предметы и поверхности, благодаря чему может действовать безопасно для себя и для окружающих. Например, АСИМО владеет понятием «ступенька» и не будет падать с лестницы, если его не столкнуть. Кроме того, АСИМО умеет двигаться, обходя людей, вставших у него на пути.
Различение звуков
Различение звуков происходит благодаря системе HARK, в которой используется массив из восьми микрофонов, расположенных на голове и теле андроида. Она обнаруживает, откуда пришёл звук, и отделяет каждый голос от внешнего шума. При этом ей не задаётся количество источников звука и их местоположение. На данный момент HARK, способна надёжно (70-80% точности) распознавать три речевых потока, то есть ASIMO способен улавливать и воспринимать речь сразу трёх человек, что обычному человеку недоступно. Робот умеет откликаться на собственное имя, поворачивать голову к людям, с которыми говорит, а также оборачиваться на неожиданные и тревожные звуки - такие, например, как звук падающей мебели.
Узнавание лиц
АСИМО способен узнавать знакомые лица, даже во время движения. То есть, когда движется сам АСИМО, движется лицо человека, или движутся оба объекта. Робот может отличать примерно десять разных лиц. Как только АСИМО узнаёт кого-нибудь, он тут же обращается к узнанному по имени.
АСИМО умеет пользоваться интернетом и локальными сетями. После подключения к локальной сети дома, АСИМО сможет разговаривать с посетителями через домофон, а потом докладывать хозяину, кто пришёл. После того как хозяин согласится принять гостей, АСИМО сумеет открыть дверь и довести посетителя до нужного места.
Характеристики:
| ASIMO (2000) |
next-gen ASIMO (2004) |
next-gen ASIMO (2005) |
new ASIMO (2010) |
|
|---|---|---|---|---|
| Масса | 52 кг | 54 кг | 80 кг | |
| Высота | 120 см | 130 см | 160 см | |
| Ширина | 45 см | 45 см | ||
| Глубина | 44 см | 37 см | ||
| Скорость ходьбы | 1,6 км/ч | 2,5 км/ч | 2,7 км/ч 1,6 км/ч (при переносе груза до 1 кг) |
|
| Скорость бега | - | 3 км/ч | 6 км/ч (по прямой) 5 км/ч (с поворотами) |
|
| Отрыв от земли | - | 0,05 с | 0,08 с | |
| Батареи | Никель-гидридные батареи 38,4 В / 10 А·ч / 7,7 кг цикл зарядки 4 часа |
Литий-ионные батареи 51,8 В / 6 кг цикл зарядки 3 часа |
||
| Время работы | 30 мин | от 40 мин до 1 часа (в режиме ходьбы) | ||
| Степеней свободы | 26 | 30 | 34 | |
Toyota тоже разработала себе робота-гуманоида, предназначение которого не отличается от роботов Sony и Honda - то есть, развлечение, создание "человекопомощника" и т.п. Всего у Toyota есть 5 роботов, наименование которых Версия-1, Версия-2, ... . Своего первого робота, который играл на трубе , компания показала людям на международной выставке EXPO-2005 в Японии.
В июле 2009 года компания Тойотa показала видео со своим роботом-гуманоидом, где он показывает свои беговые способности:
В 2011 году корпорация HONDA представила новую версию своего робота-андроида Asimo. Теперь он может прыгать на одной ноге, балансировать на каждой ноге долгое время, но главным достижением в последней разработке стали руки. Робота наградили полностью функциональными пальцами.
Разработка этого чуда техники началась еще в конце 80-х прошлого века. HONDA выпускала роботов серии Е и Р, они и дали почву для развития человекоподобного робота ASIMO.

Официальная версия происхождения названия андроида - сокращение от Advanced Step in Innovative Mobility, что означает «новый шаг в технологии мобильности роботов». Но есть и неофициальная, согласно которой, свое имя ASIMO получил в честь Айзека Азимова, знаменитого автора Трех Законов Робототехники. Вообще, в японском языке имя робота произносится как ASIMO и созвучно со словосочетанием «А также ноги».
Первый робот линейки ASIMO был представлен в 2000 году. Двигался он со скоростью 1,6 км/ч, мог пожимать руку и понимал отдельные слова и простые фразы. Рост его был 120 см, а вес 53 кг. Через год робот был предоставлен для сдачи в аренду. Купить его нельзя, он попросту не продается. Из-за этого правила представители компании HONDA очень долго вели переговоры с одним арабским шейхом, который ну никак не могу понять, как так вышло, что купить робота нельзя. Месяц аренды ASIMO стоит 14.000$.

С 2006 года роботы компании HONDA начинают работать на приеме гостей во всех офисах фирмы. Последняя версия многофункционального человекообразного робота может подавать напитки на подносе, узнавать имена людей по специальным карточкам у них на груди, отвечать на телефонные звонки, катить перед собой четырехколесную тележку и даже способна идти рядом с человеком, держа его за руку. Новый робот стал выше на 10 см и легче почти на 10 кг.

Функции, которые позволяют ASIMO общаться с людьми, делятся на 5 категорий, каждую из них компания HONDA совершенствует с каждым новым роботом. Итак, первая категория - распознавание движущихся объектов. В голову андроида встроена видеокамера, с ее помощью он может следить за перемещениями большого числа объектов, и не только следить, робот вычисляет дистанцию от себя до объекта, а также направление его движения. Это помогает ASIMO следовать за человеком, приветствовать его, когда он попадает в пределы досягаемости робота.

Категория вторая - распознавание жестов. ASIMO умеет истолковывать движения рук. Например, когда человек протягивает ему руку, он понимает, что ее надо пожать, поприветствовать собеседника. Если ему помахать рукой, робот поймет, что вы прощаетесь с ним. А еще, он воспринимает указательные жесты, руками можно указать направление движения ASIMO.
Еще одна категория - распознавание окружения. Она необходима, чтобы робот действовал максимально безопасно для себя и окружающих его. Он умеет распознавать предметы и поверхности. Например, владеет понятием «ступенька» и благодаря этому не упадет с лестницы. ASIMO может обходить людей, которые появляются на его пути, так что он ни в кого не будет врезаться.

Различать звуки андроид тоже умеет. В этом ему помогает система HARK, в которой используются восемь микрофонов, расположенных на голове и теле робота. Система знает, откуда звук доносится, отличает голос от других внешних звуков. Сейчас HARK способна распознавать три речевых потока, получается, что ASIMO умеет улавливать и воспринимать речь сразу трех собеседников, что не доступно человеку, между прочим. Робот откликается на свое имя, а во время разговора обязательно поворачивает голову к собеседнику. Если вдруг он услышит тревожный звук типа сирены или звук падающей мебели, ASIMO обязательно обернется к источнику.

Последняя категория - узнавание лиц. Робот без труда узнает знакомые лица, даже во время движения, на одной из презентаций ASIMO узнал сотрудницу компании HONDA со спины и окликнул ее. Андроид способен помнить до 10 лиц.
Естественно, японский робот умеет пользоваться Интернетом и локальными сетями. После подключения к локальной сети дома ASIMO сможет разговаривать с посетителями через домофон, а потом докладывать хозяину, кто пришел. После того как хозяин согласится принять гостей, он сумеет открыть дверь и довести посетителя до нужного места.
На благо разных компаний и людей сейчас трудятся 100 экземпляров ASIMO. Но стоит заметить, что изначально этот робот создавался с целью помочь человеку работать в космосе, при катастрофах или помогать людям в тех местах, где человеку просто опасно находиться. Например, в районах типа Фукусимы.



